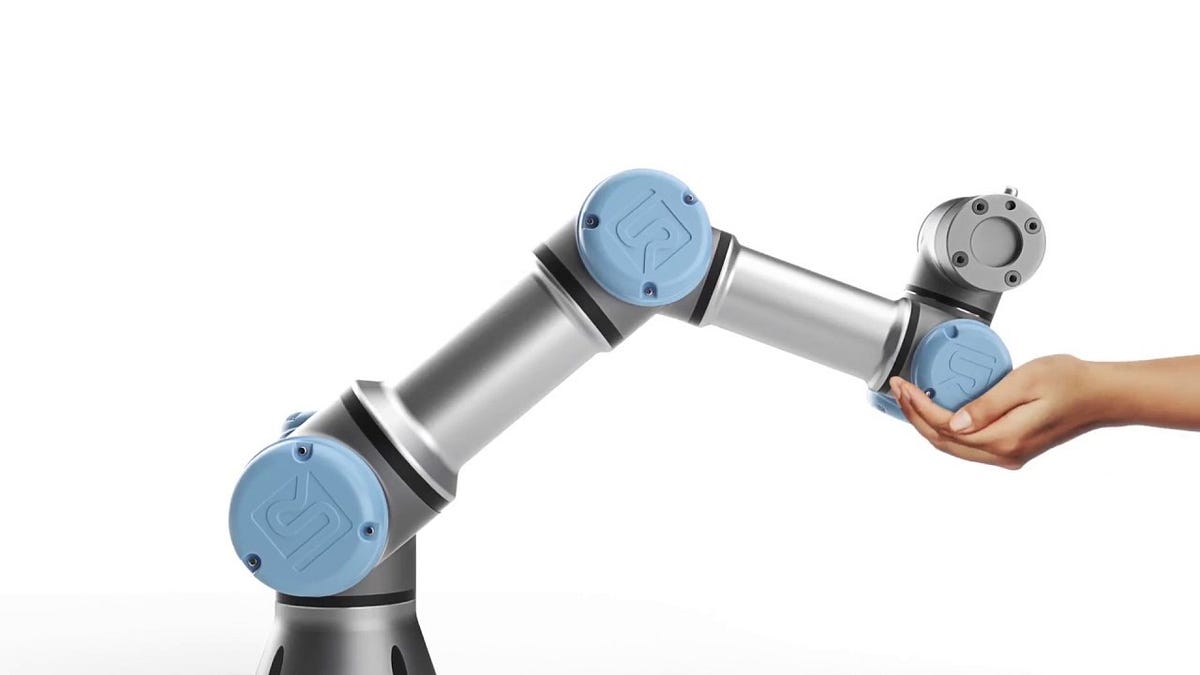
Prevenir riscos na coatividade homem-robô
Apresentados como fundamentais para a competitividade, os robôs colaborativos são de grande interesse para os fabricantes. No entanto, a robótica colaborativa levanta a questão da co-atividade homem-máquina e dos riscos associados. Para responder às principais preocupações relacionadas com a integração desta nova tecnologia, o instituto nacional francês de investigação e segurança (INRS) realizou estudos e propõe hoje material informativo destinado às empresas.
Acidentes com robôs estão sendo cada vez mais frequentes. Há relatos de casos:
1. na Amazon, em área de empacotamento e expedição que associam a intensificação de ritmos e fadiga nos processos causais..
2. em Campinas casos de robô mau caráter que batia em trabalhadores que entravam em área protegida por barreiras que historicamente eram bypassadas para corrigir falhas de soldagem que vinham sendo alvo de pressões de chefias
3. No setor elétrico,, distribuição de energia, os religadores automáticos (entendo que se trata da mesma lógica) já aparecem em dois tios de acidentes. em uns casos, sendo mantidos ativados em áreas onde sabidamente há trabalho de equipe de manutenção (terceira, se fosse própria o equipamento seria desligado). O sistema teve curto, desligou e foi religado três vezes repetindo choque de alta tensão em terceiro que atuava logo abaixo da linha primária. A APR realizada considerava que, para terceiro, atuar aquela distância da rede energizada não implicava em risco. O sistema já tinha histórico de acidentes em situações similares., A investigação não conseguiu acesso a detalhes dos processos decisórios identificados no caso.
Num segundo tipo de acidente, ocorrido em zona de transição, fronteiras da cobertura atribuída à proteção de religadores, o religador não desligou, não desenergizou) o sistema. A investigação não conseguiu esclarecer os processos decisórios relacionados às definições das áreas de cobertura atribuídas a cada religador..
4. Há relatos de acidentes envolvendo casos autônomos e colisões que também apontam novos desafios em caminhos das investigações.
5. Estiudos sobre armadilhas cognitivas em sistemas automatizados apoiados na noção de alça de controle dos sistemas (Nancy Leveson, David Woods, Cook e outros) mostram diferentes possibilidades de falhas. no desenho da alça:
1. Inadequação ao impor constrangimentos para a implementação de ações de controle
1.1) Fatores de risco não identificados
1.2) Perda, ineficácia ou inadequação de ações de controle para perigos identificados
2. Inadequação ao executar ações de controle
2.1) Falha de comunicação
2.2) Inadequação da operação do “atuador”
2.3) Defasagem de tempo (“time lags”)
3. Perda ou inadequação de “feedback”
3.1) Não incluído na concepção do sistema
3.2) Falha de comunicação
3.3) Defasagem de tempo (“time lags”)
3.4) Inadequação na operação de sensor (Informação incorreta ou não fornecida).
Peço aqui a ajuda dos universitários. Comentem vivências que tenham do tema, indiquem leituras, monitorem o andamento das discussões








Acidentes com robôs estão…
Acidentes com robôs estão sendo cada vez mais frequentes. Há relatos de casos:
1. na Amazon, em área de empacotamento e expedição que associam a intensificação de ritmos e fadiga nos processos causais..
2. em Campinas casos de robô mau caráter que batia em trabalhadores que entravam em área protegida por barreiras que historicamente eram bypassadas para corrigir falhas de soldagem que vinham sendo alvo de pressões de chefias
3. No setor elétrico,, distribuição de energia, os religadores automáticos (entendo que se trata da mesma lógica) já aparecem em dois tios de acidentes. em uns casos, sendo mantidos ativados em áreas onde sabidamente há trabalho de equipe de manutenção (terceira, se fosse própria o equipamento seria desligado). O sistema teve curto, desligou e foi religado três vezes repetindo choque de alta tensão em terceiro que atuava logo abaixo da linha primária. A APR realizada considerava que, para terceiro, atuar aquela distância da rede energizada não implicava em risco. O sistema já tinha histórico de acidentes em situações similares., A investigação não conseguiu acesso a detalhes dos processos decisórios identificados no caso.
Num segundo tipo de acidente, ocorrido em zona de transição, fronteiras da cobertura atribuída à proteção de religadores, o religador não desligou, não desenergizou) o sistema. A investigação não conseguiu esclarecer os processos decisórios relacionados às definições das áreas de cobertura atribuídas a cada religador..
4. Há relatos de acidentes envolvendo casos autônomos e colisões que também apontam novos desafios em caminhos das investigações.
5. Estiudos sobre armadilhas cognitivas em sistemas automatizados apoiados na noção de alça de controle dos sistemas (Nancy Leveson, David Woods, Cook e outros) mostram diferentes possibilidades de falhas. no desenho da alça:
1. Inadequação ao impor constrangimentos para a implementação de ações de controle
1.1) Fatores de risco não identificados
1.2) Perda, ineficácia ou inadequação de ações de controle para perigos identificados
2. Inadequação ao executar ações de controle
2.1) Falha de comunicação
2.2) Inadequação da operação do “atuador”
2.3) Defasagem de tempo (“time lags”)
3. Perda ou inadequação de “feedback”
3.1) Não incluído na concepção do sistema
3.2) Falha de comunicação
3.3) Defasagem de tempo (“time lags”)
3.4) Inadequação na operação de sensor (Informação incorreta ou não fornecida).
Peço aqui a ajuda dos universitários. Comentem vivências que tenham do tema, indiquem leituras, monitorem o andamento das discussões
PB (IIdeberto)